Продолжаем осваивать ROS. Если честно то очень увлекательный вид радиосвязи. Все здесь интересно и продумано. Особенно интересно работать в режиме радиомаяка. Все просто и наглядно, а самое главное что радиомаяк может отвечать на вызов, и давать рапорт вызываемой станции… Ну важно все выяснить и так же важно как говориться все проверить, ну и пока свежи еще впечатления можно писать и в блог… 
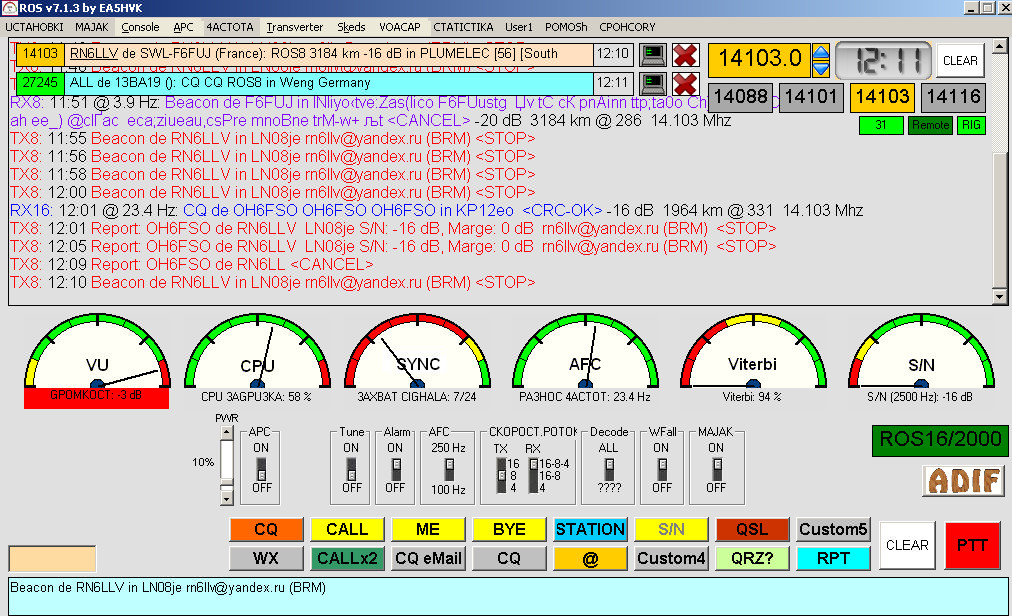
Кстати вот чем еще здорово полное управление трансивером, так это то что можно спокойно заниматься своими делами. А компьютерная программа ROS сама включит трансивер на передачу, сама выключит, если что ответит и на вызов. В общем красота! Ну мне интересно провести серию экспериментов с QRP ROS, и поэтому снова звучит в эфире мой радиомаяк. 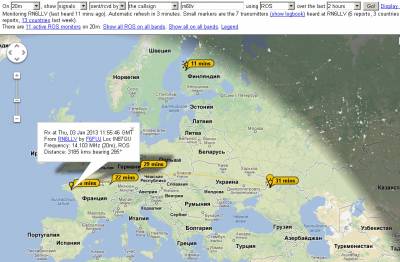
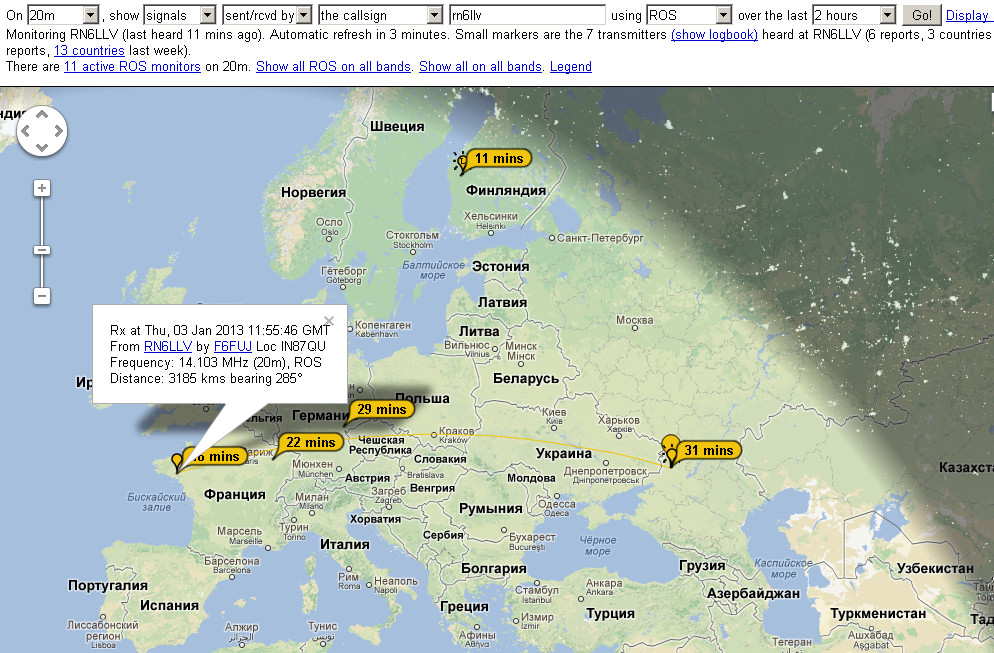
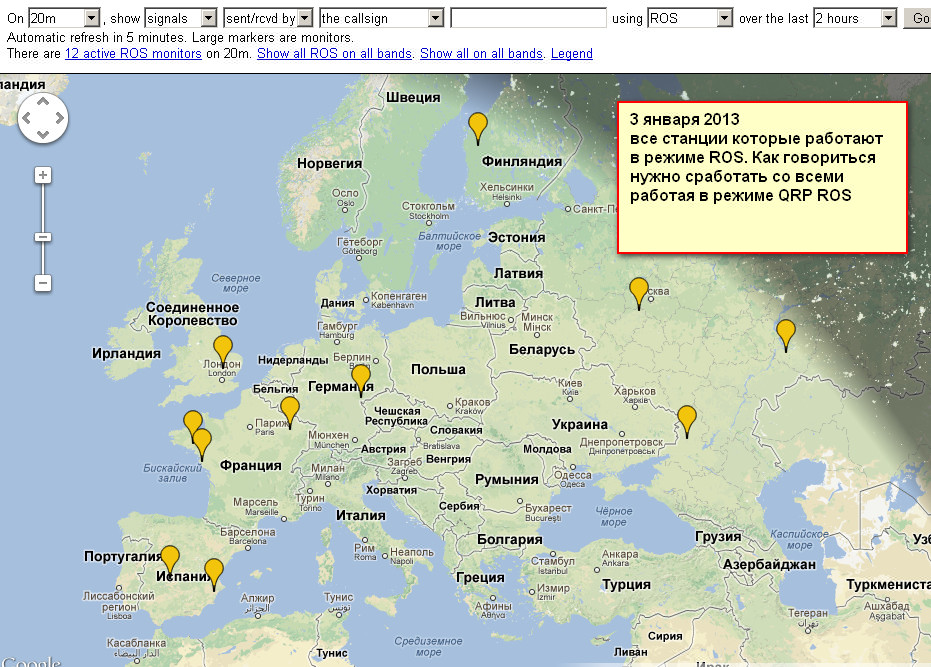
Итак сегодня работаем на 20-ке небольшой мощностью в 5 ватт. И в режиме маяка. На карте спотов видны станции которые активны. Но что удивительно станции которые расположены не так далеко от меня, не принимают сигналы моего радиомаяка, а вот станции в Европе принимают (хотя конечно и не все)… 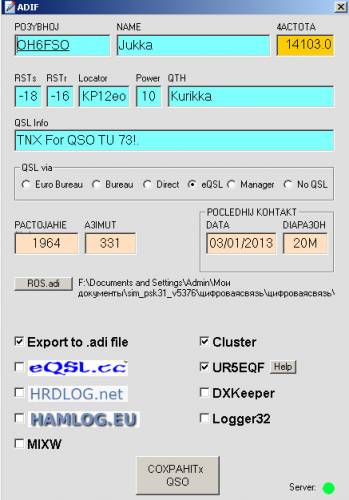
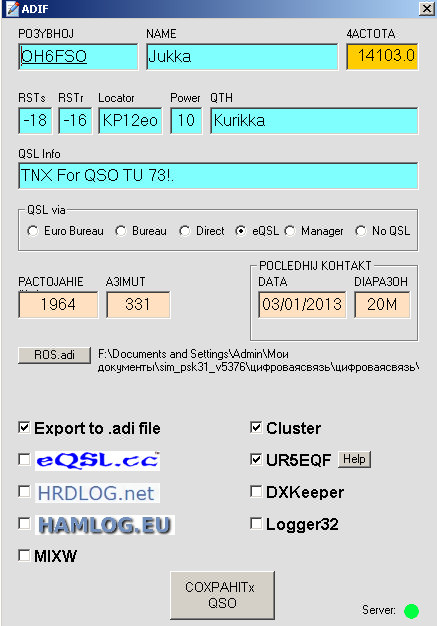
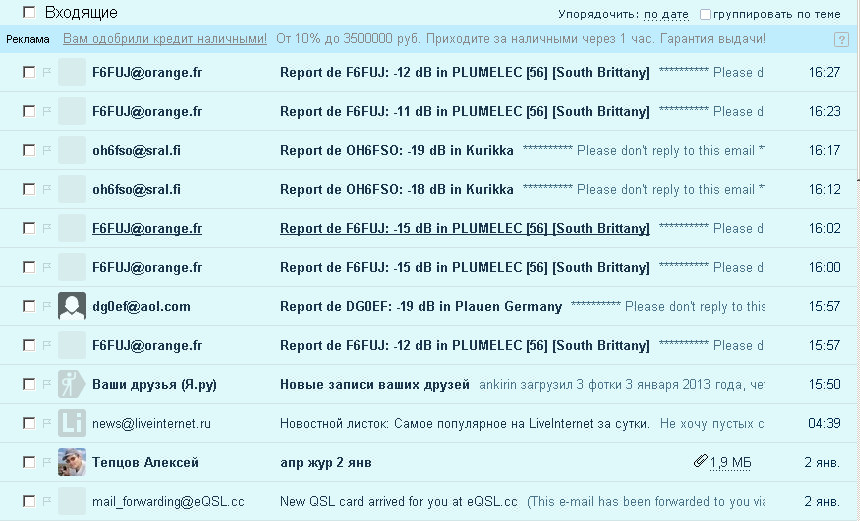
На электронную почту приходят уведомления, и это тоже здорово. Вот за эту особенность мне очень нравиться работать в этой модуляции. Причем сообщения приходящей по электронной почте содержит довольно подробную информацию, что позволяет выяснить буквально все интересующие аспекты проведенной таким образом радиосвязи. 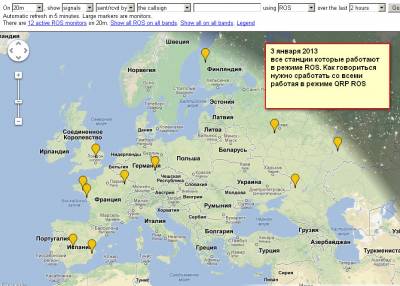
Итоги работы: за один час маяк услышали станции: F6FUJ, FZK387, DG0EF, OH6FSO. Лучше всего сигнал принимал F6FUJ (но это благодаря трехэлементной антенны яги). Не получилось принять сигналы от находящихся рядом станций (возможно или прохождение такое или просто те станции работали на других частотах).

|