Продолжаю осваивать новую модуляцию ROS.
Начал с того что настроил радиомаяк. И оставалось только выяснить как он
включается. А все оказалось просто: оказывается тоже есть переключатель, так
что все включается. Потом идет обратный отчет (интервал времени таймера
настраивается, минимальный промежуток 1 минута) и автоматически включается на
передачу. 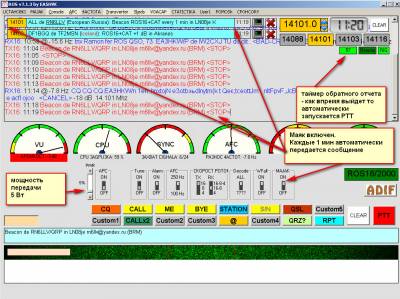
Все работает. Напоминает режим WSPR. С только одной существенной разницей:
передавать наш маяк может довольно много информации (опять таки есть все в
настройках самой программы). Во время
передачи программа автоматически отправляет спот (похоже что этот спот можно
увидеть только в самой программе, в ДХ кластер он не попадает, это я тоже
проверил) – и как говориться все могут увидеть…Тем не менее мой сигнал был
увиден и программа автоматически отправила кореспоненту рапорт: 
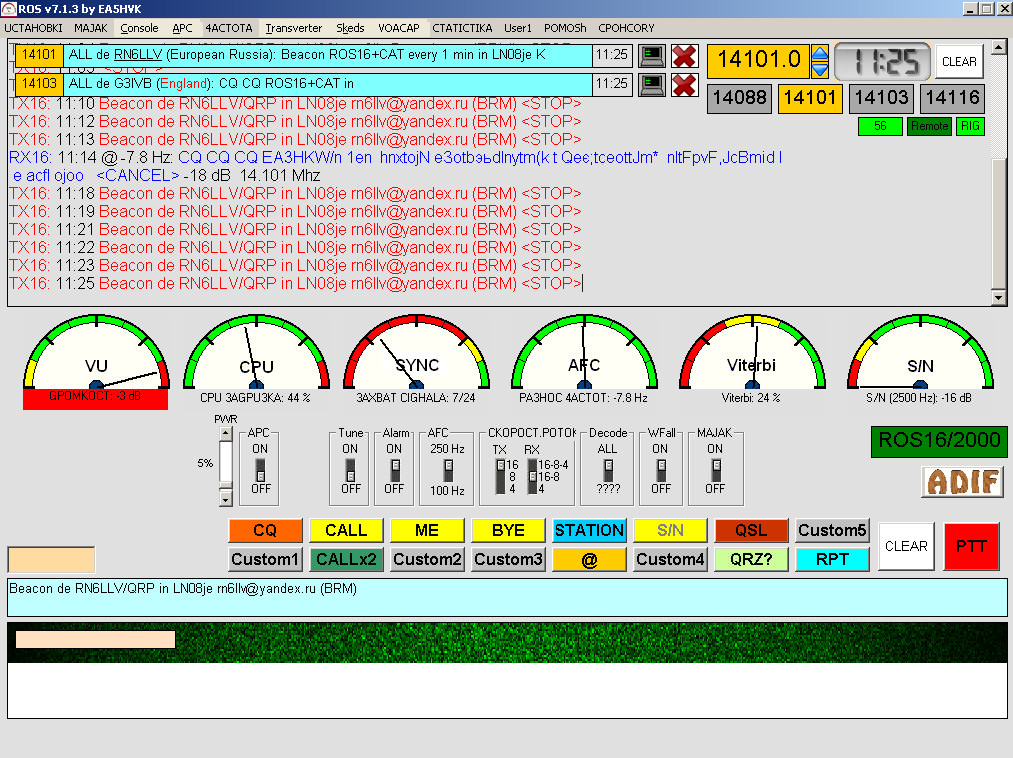
TX16: 11:34 Beacon de RN6LLV/QRP in LN08je
rn6llv@yandex.ru (BRM) <STOP>
RX16: 11:36 @ 15.6 Hz: de EA4EQ de EA4EQ in IN80dl <CRC-OK> -14
dB 3586 km @ 273 14.101 Mhz
TX16: 11:36 Report: EA4EQ de RN6LLV/QRP LN08je S/N: -14 dB, Marge: +2 dB rn6llv@yandex.ru (BRM) <STOP>
Так с режимом маяка разобрался. Даже увидел как он в ответ
работает на вызов станции. Очень хорошо – очень полезный режим, всегда может
пригодиться. Можно заниматься другими делами (например писать в радиоблог, или
просто пить чай, а всё все равно будет работать). 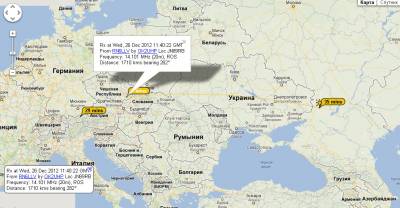
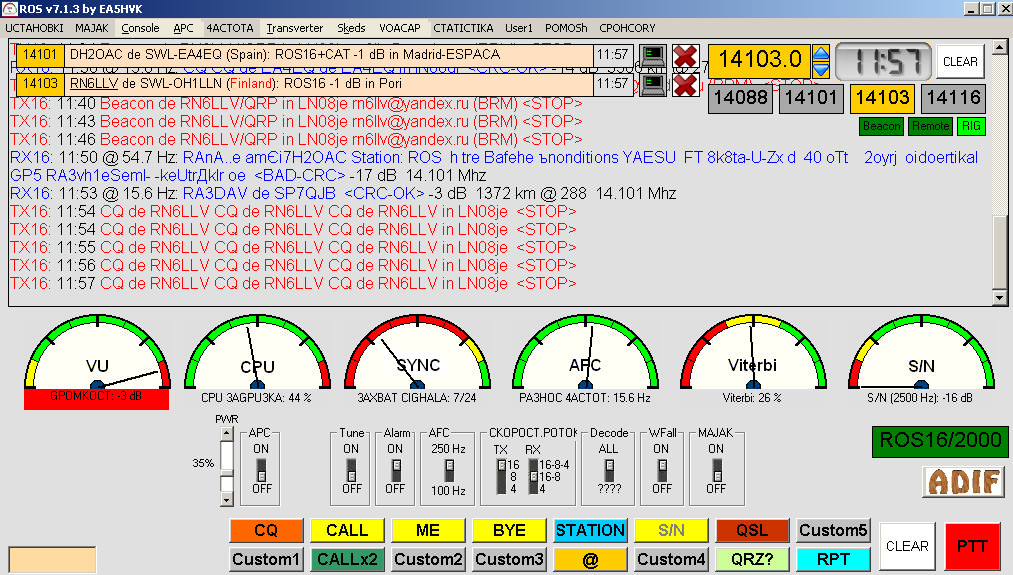
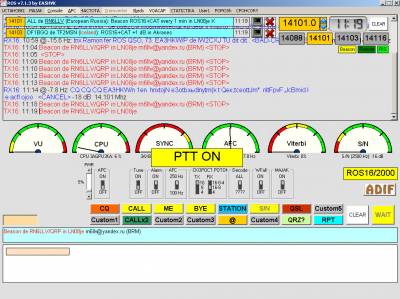
Теперь попробуем провести радиосвязь без режима маяка. Сегодня
попробую освоить работу на общий вызов. Нахожу свободную частоту, и нажимаю CQ. Пошла передача! И что
здорово – программа сама уже выключает передачу, когда текст макроса уже
передан в эфир. А то раньше все приходилось делать ручками… Значит зову – но
пока никто не отвечает… 
Ничего страшного. Ой на моей частоте кто-то уже связь
проводит. Ладно переключаюсь на другую частоту. Клик мышкой на кнопку частоты и
воля: трансивер уже тоже автоматически сменил частоту с 14101 на 14103! Ура
теперь и вернер вращать не нужно! Вот какая удобная КАТ система! Продолжаю
работать на общий вызов, уже на новой частоте. Тут же информация уходит в спот
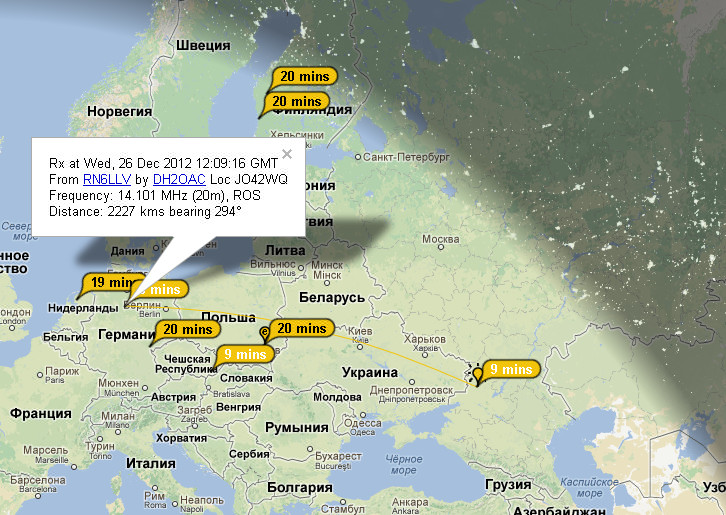
(видят его только пользователи программы ROS). Закончилась передача. Ух ты тут же пришел спот мне:
оказывается меня приняли в Финляндии! Вот тебе и 30 Вт на 20ке! 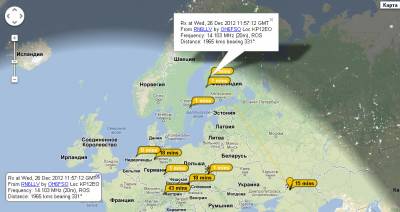
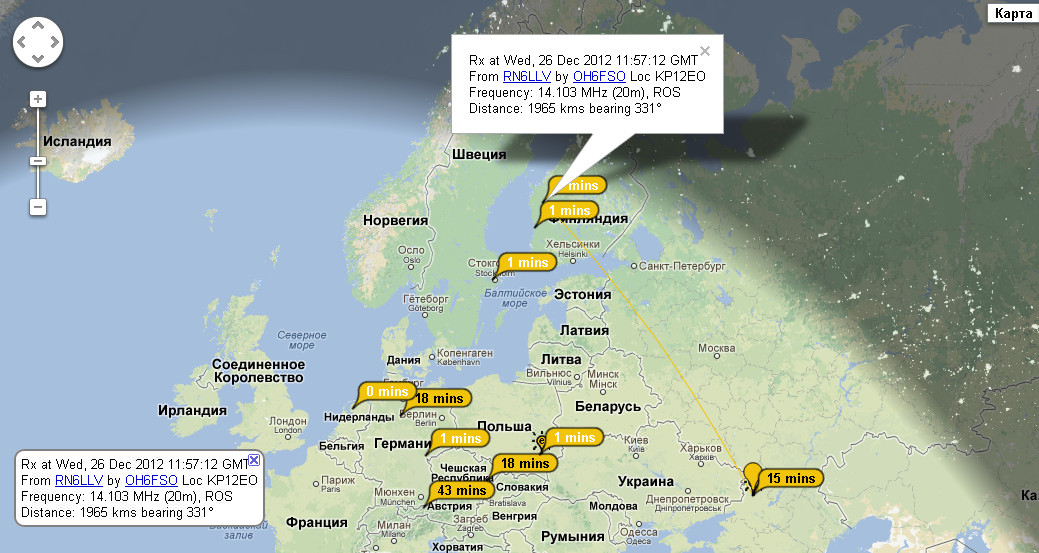
Сразу же распирает любопытство: а если приняли, то успел ли
этот спот попасть на карту спотов. Я тут же перезагружаю карту в браузере (ну
буквально прошло там всего секунд 5) и есть подтверждение! Приняли и на карте
все есть! Вот до чего техника дошла! И как здорово осознавать что именно твой
позывной звучит в эфире, и что его еще где-то далеко принимают, и более того
отмечают это все на карте! Вот здорово! 
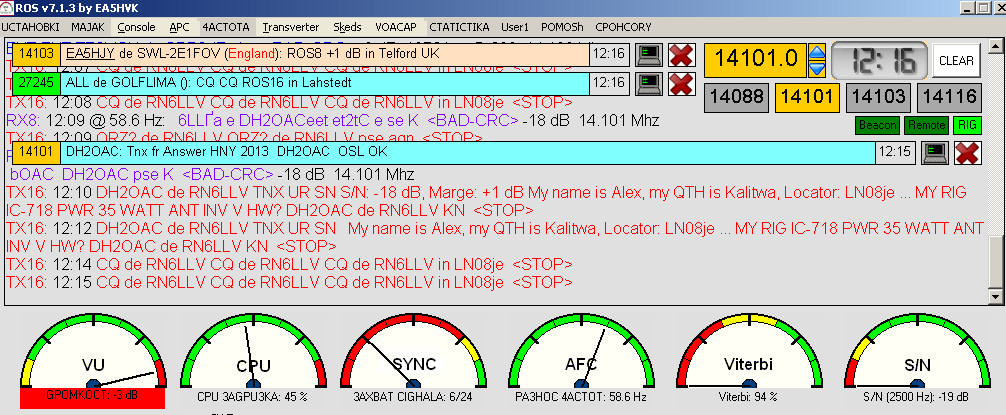
Ура! Это наконец на мой вызов ответили! Ответил немецкий
радиолюбитель DH2OAC. Вот где испытываешь
двойную радость: во-первых что тебе наконец ответили, а во вторых мы в эфире
встретились в первый раз. Правда уровень сигнала был мизерный -16 дБ. И все же
мы успели обменяться минимальной информацией. А вот закончить QSO традиционно не получилось. Если бы это
был обычный режим ПСК, то пожалуй связь можно было бы и не засчитывать. Но у
нас есть одна возможность… 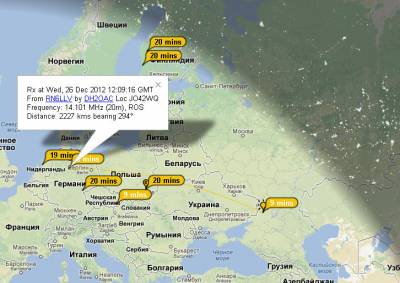
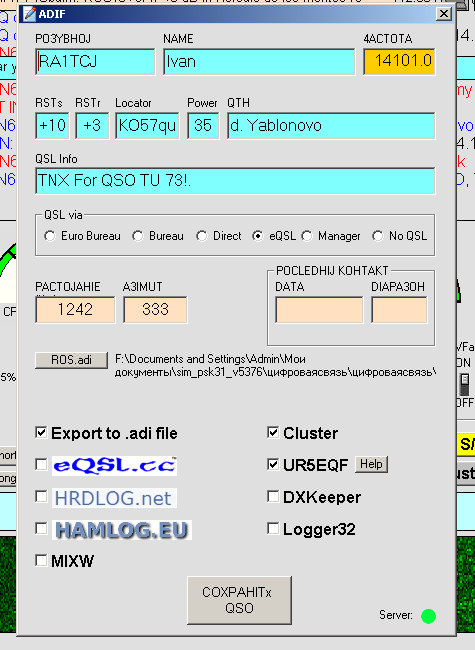
А вы спрашиваете что это за возможность такая? Отвечаю с
удовольствием: это прямой чат в программе ROS с нужным радиолюбителем. В общем
написал примерно так: подтверждаю прием ваших сигналов, спасибо. Связь тоже
подтверждаю и отправил уже электронную карточку. Через секунд десять на экране
программы возникло сообщение DH2OAC:
Hope to hear you under better konditions Tnx for short QSO 73 DH2OAC – что все ок, спасибо
карточку тоже отправлю с новым годом! Вот такое возможно только в ROS связи. Как говориться на сегодня
впечатлений вполне достаточно…. И
самое главное это уже удается уже практически полностью разобраться со всеми
тонкостями программы. 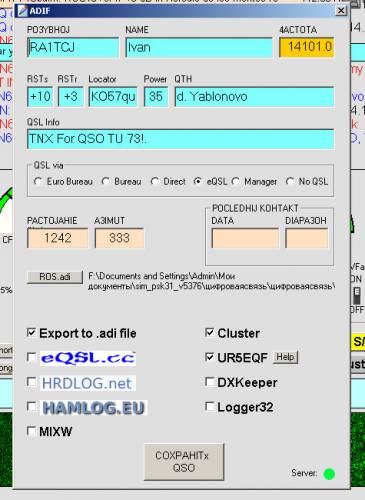
|